
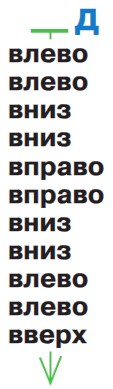
Найди начальное положение Робика, из которого он сможет выполнить программу Д. Отметь это положение в начальной позиции. Дорисуй теперь позицию Робика после выполнения программы Д.
Начальная позиция:
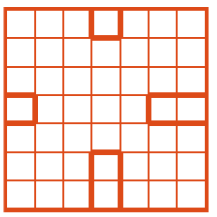
Начальная позиция:
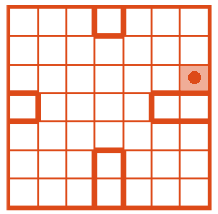
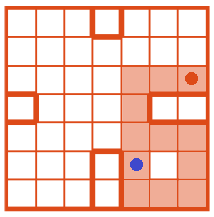
Позиция Робика после выполнения программы Д:
Пожалуйста, оцените решение